Worked on the implementation of self-triggered control using Control Barrier Functions to enhance safety and efficiency in critical systems.
Explored CBF fundamentals, including safe sets, barrier certificates, and stability conditions, and demonstrated its role in ensuring system states stay within predefined safe regions.
Implemented various design techniques, including optimization-based methods and quadratic programming, and explored modeling and robust control techniques for ensuring robustness against parameter variations in CBF-based control.
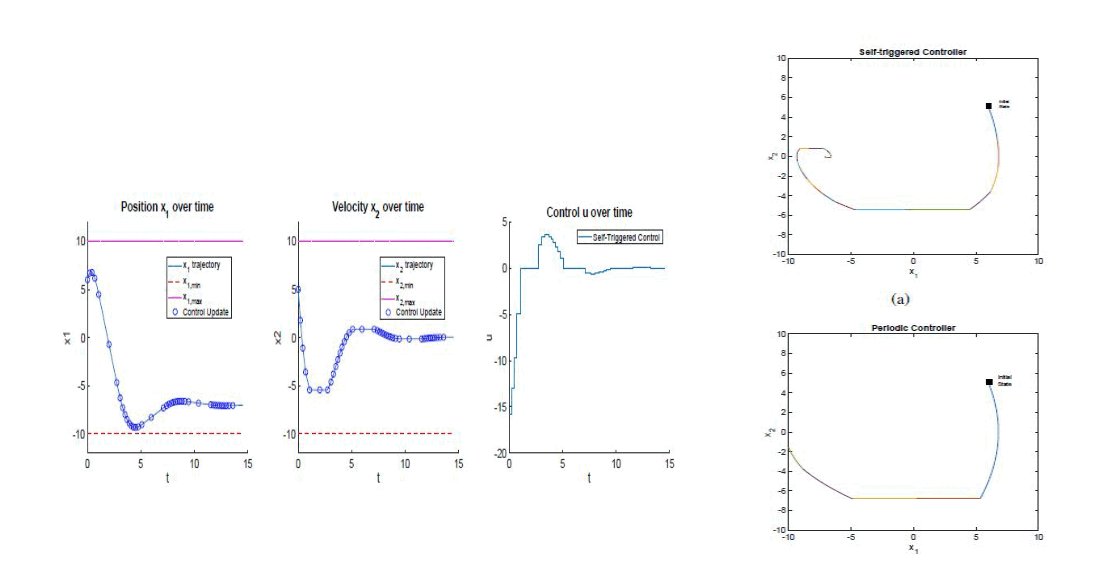
Applied CBFs to a double integrator system to showcase their real-world use in safety-critical control, and Developed a CBF-based control law effectively constraining system states within predefined safe limits.
Designed a controller addressing limitations of traditional periodic controllers. and intoduced the concept of a "safe period" for implementing Zero-Order Hold (ZOH) control, ensuring safety guarantees.
Safety Critical Control systems
Adaptive Control
Control Barrier Functions
Optimization
Quadratic Programming
MATLAB